




























給機器人裝“超級仿生手” 像人類一樣靈活抓取
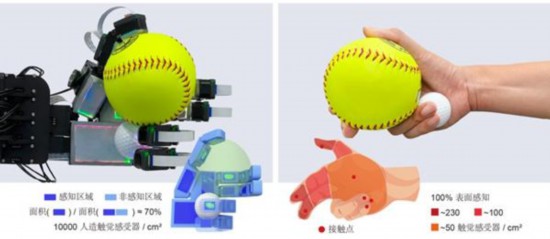
機器人仿生手F-TAC Hand與人手性能對比圖。研究團隊供圖
想過機器人能像人類一樣,靈巧地拿起易碎花瓶,或同時抓起多個形狀各異的物品嗎?這些人類手部的“拿手好戲”,如今機器人手也能做到了。
近日,北京大學人工智能研究院、北京大學武漢人工智能研究院、北京通用人工智能研究院、北京大學工學院和倫敦瑪麗女王大學聯合組成的研究團隊,取得這樣一項機器人技術突破,成果論文《高分辨率觸覺感知機器手實現類人適應性抓取》在國際學術期刊《自然-機器智能》刊發。
隨著人類的進化,手部的功能由攀爬轉為使用工具,並逐漸掌握了精准抓握能力。手部既是人類改造自然、與外界交互的核心器官,也是智能的核心載體。論文共同第一作者、北京通用人工智能研究院研究員李皖林介紹,人的手部具有結構高度復雜、功能極為精密的特點,手部由27塊骨骼和34塊肌肉組成,提供了24個自由度的靈活性。對人類手部功能的研究,是具身智能與機器人學科研的前沿領域。
他告訴記者,人在拿取物體時涉及“觸覺反饋”與“運動功能”兩大能力:觸覺反饋包含運動覺與皮膚觸覺,前者通過肌肉、肌腱和關節感知力量,后者通過皮膚感知接觸狀態、紋理、溫度、摩擦力等物理特性﹔運動功能包括運動學與動力學,前者研究關節的角度、位置及其運動的幾何關系,后者研究力和扭矩如何作用於關節和肢體,從而實現精確的運動控制。
在以往的研究中,觸覺反饋與運動能力的整合,被認為是機器人研究領域中的關鍵挑戰之一。此次研究團隊開發的“基於全手觸覺的機器人仿生手”(Full-hand Tactile-embedded Biomimetic Hand,簡稱F-TAC Hand),是國際罕見的同時具備全手高分辨率觸覺感知和完整運動能力的機器人手系統。
論文共同第一作者、北京大學人工智能研究院博士生趙秭杭告訴記者,人類手部的靈活性和適應性,很大程度上歸功於其密集的觸覺傳感能力,這使人們能夠精確感知與調整抓握過程。例如,人類在抓取一個裝滿水的杯子與一個空杯子時,抓握杯子的位置、角度、方式可能完全不同。然而,在機器人領域,如何在不影響運動功能的前提下實現全手觸覺覆蓋,很長時間以來是個難題。
他告訴記者,研究團隊開發的高分辨率觸覺傳感器,覆蓋了機器人“手掌”表面70%的區域,空間分辨率達到0.1毫米,相當於每平方厘米約有1萬個觸覺像素,遠超目前商用機器人手的觸覺感知能力。
F-TAC Hand的設計靈感來源於人類手部的生物結構。
人類手部觸覺系統由兩個關鍵要素組成:遍布皮膚的密集觸覺傳感器陣列和大腦中專門解釋這些感覺輸入的神經處理機制。趙秭杭說,F-TAC Hand模擬了這種設計,將17個高分辨率觸覺傳感器,以6種不同配置集成在一起,並在不犧牲靈活性的前提下,實現了前所未有的觸覺覆蓋范圍。
論文共同第一作者、北京大學人工智能研究院博士生李宇飏告訴記者,團隊通過開發一種生成多樣化抓取策略的算法,基於概率模型,能夠產生大量多樣化的抓取方式,其中涵蓋了與人類非常相似的19種抓取類型。
他進一步解釋:多物體同時抓取,是評估機器人手靈巧性的重要基准測試,比單一物體要復雜得多。抓取單一物品可以通過雙指夾持的方式實現,但當用一隻手抓取多個物體時,需要做精確的全手接觸檢測並調整運動策略,才能實現精准、穩定抓取。
實驗結果表明,當規劃出的多物體抓取策略,在現實環境中遇到障礙時,F-TAC Hand能夠在約100毫秒內感知情況並快速切換到替代策略,完成任務。為驗証這一技術的實際效果,研究團隊在600次真實世界實驗中評估了F-TAC Hand的多物體抓取能力。
論文共同第一作者、北京通用人工智能研究院研究員劉騰宇告訴記者,相比沒有觸覺反饋的系統,F-TAC Hand在面臨執行誤差和物體碰撞風險時表現出顯著的適應性優勢,使F-TAC Hand能夠像人類一樣,在不確定環境中保持高效靈活的操作能力,這對機器人在家庭、醫療和工業環境中的實際應用至關重要。
“這項研究不僅是技術上的突破,更為理解智能的本質提供了新視角。”論文通訊作者、北京大學人工智能研究院助理教授朱毅鑫說,近年來,大型語言模型等基於純計算的人工智能取得了顯著進展,但它們在處理物理世界的實際交互任務時仍面臨巨大挑戰。此次研究表明,真正的智能行為需要“知行合一”,豐富的感知能力對於機器智能的發展同樣不可或缺。F-TAC Hand的成功,為“具身智能”開辟了新的研究方向,對構建下一代人工智能系統具有重要啟示意義。
作為人形機器人與外界交互的重要媒介,機器人手是機器人功能性的直接體現,需要“人手”參與的工作都可以是機器人手的應用場景。朱毅鑫告訴記者,這項研究成果有望推動機器人技術在醫療、工業制造、特殊環境作業等領域更廣泛的應用。(邱晨輝)
分享讓更多人看到 
人民日報社概況 | 關於人民網 | 報社招聘 | 招聘英才 | 廣告服務 | 合作加盟 | 供稿服務 | 數據服務 | 網站聲明 | 網站律師 | 信息保護 | 聯系我們
人民日報違法和不良信息舉報電話:010-65363263 舉報郵箱:jubao@people.cn
人民網服務郵箱:kf@people.cn 違法和不良信息舉報電話:010-65363636 舉報郵箱:rmwjubao@people.cn
互聯網新聞信息服務許可証10120170001 | 增值電信業務經營許可証B1-20060139 | 廣播電視節目制作經營許可証(廣媒)字第172號
信息網絡傳播視聽節目許可証0104065 | 網絡文化經營許可証 京網文[2020]5494-1075號 | 網絡出版服務許可証(京)字121號 | 京ICP証000006號 | 京公網安備11000002000008號
人 民 網 股 份 有 限 公 司 版 權 所 有 ,未 經 書 面 授 權 禁 止 使 用
Copyright © 1997-2025 by www.people.com.cn. all rights reserved




-
評論

-
關注
微信微博快手
 第一時間為您推送權威資訊
第一時間為您推送權威資訊
 報道全球 傳播中國
報道全球 傳播中國
 關注人民網,傳播正能量
關注人民網,傳播正能量
